 Sterowanie silnikami prądu stałego jest powszechnie znane i szeroko omówione. Jest dostępnych wiele gotowych kontrolerów z możliwością wyboru kierunku i prędkości obrotowej. Jednak większość z nich jest dosyć niskiej mocy lub są bardzo drogie.
Sterowanie silnikami prądu stałego jest powszechnie znane i szeroko omówione. Jest dostępnych wiele gotowych kontrolerów z możliwością wyboru kierunku i prędkości obrotowej. Jednak większość z nich jest dosyć niskiej mocy lub są bardzo drogie.
Poszukując rozwiązania jak sterować mocnymi silnikami w rozsądnej cenie znalazłem projekt OSMC (http://www.robotpower.com/osmc_info/).
Sterownik nie jest dostępny w polskiej dystrybucji. Można go zamówić z zagranicznych sklepów internetowych, ale cena za dwa sterowniki wynosi prawie 2000 zł. Zdecydowano się więc samodzielne zaprojektowanie płytki PCB według oficjalnego schematu OSMC. W rezultacie powstał w pełni sprawny sterownik w 3 razy mniejszej cenie.
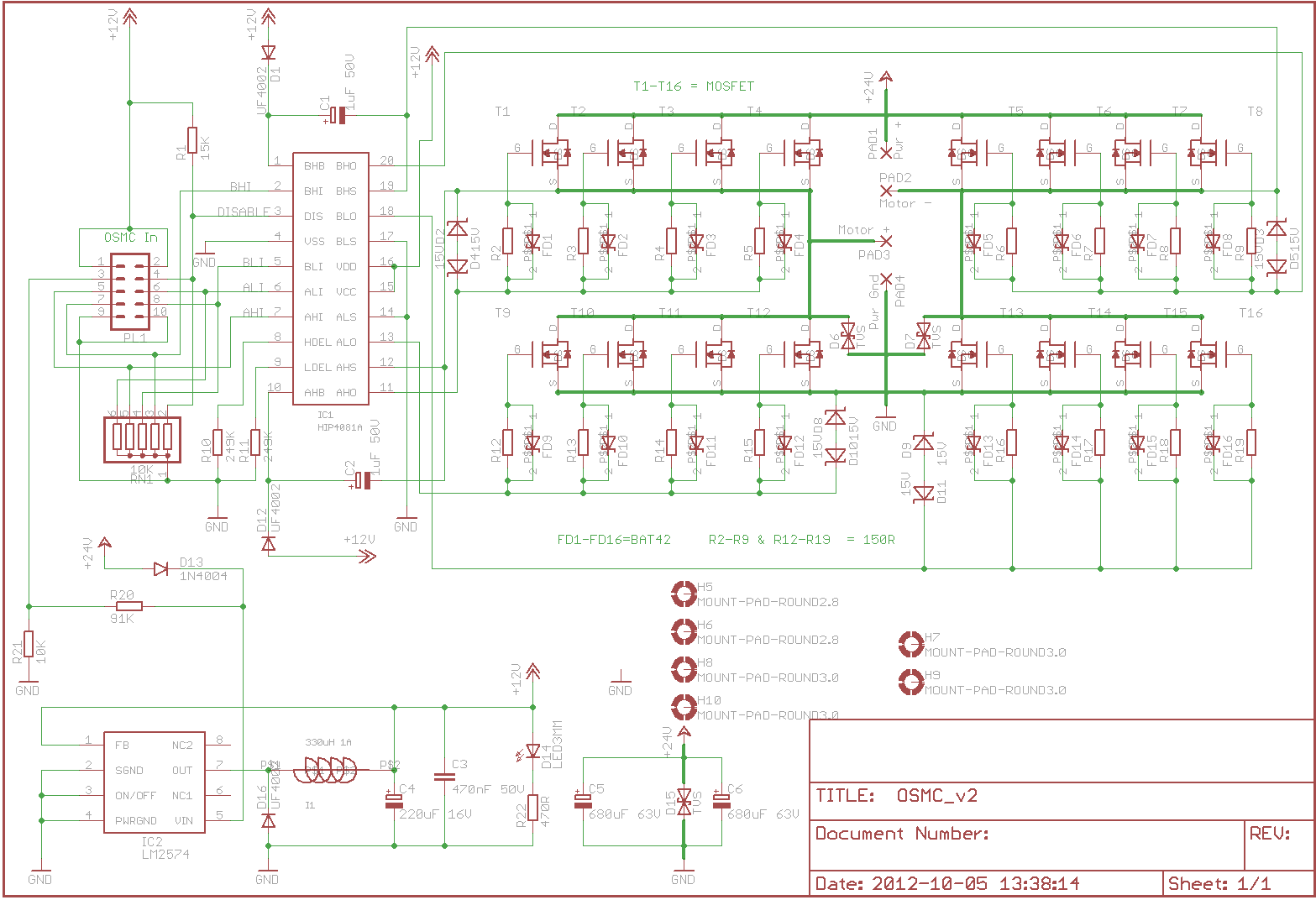
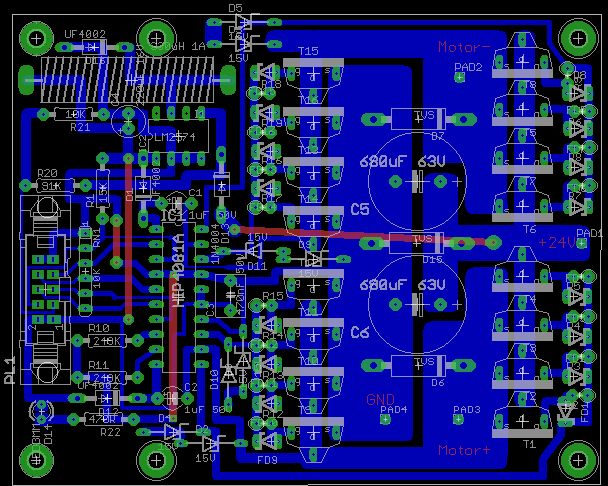
Oficjalny schemat OSMC został przeniesiony do programu EAGLE, a następnie z tak przygotowanego schematu zaprojektowano płytkę PCB.
Sterownik OSMC opiera się na popularnej metodzie sterowania silnikami tzw. mostek H, który pozwala na płynną regulacje obrotów silnika elektrycznego poprzez zmianę wypełnienia sygnału (PWM), ale przede wszystkie pozwala na zmianę kierunku obrotów silników poprzez zmianę polaryzacji. Składa się z czterech tranzystorów MOSFET które pełnią rolę przełączników.
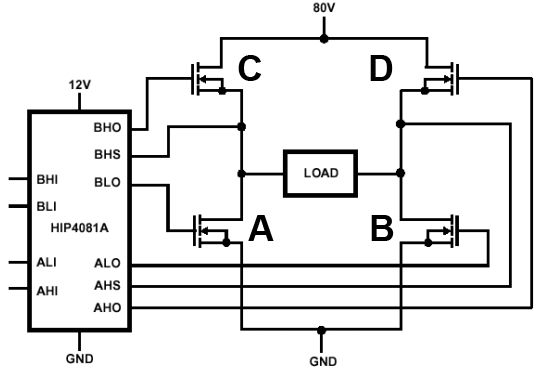
Rysunek: Uproszczony schemat mostka H z układem sterującym HIP4081A
Sterowanie kierunkiem obrotów silnika polega na odpowiednim przełączaniu przełączników A, B, C i D.
Poniższa tabela przedstawia możliwe stany.
Tabela:Tabela stanów mostka H
|
A |
B |
C |
D |
STAN |
|
0 |
0 |
0 |
0 |
Wolny bieg |
|
0 |
0 |
0 |
1 |
Wolny bieg w prawo |
|
0 |
0 |
1 |
0 |
Wolny bieg w lewo |
|
0 |
0 |
1 |
1 |
Hamowanie obustronne |
|
0 |
1 |
0 |
0 |
Wolny bieg w lewo |
|
0 |
1 |
0 |
1 |
zwarcie |
|
0 |
1 |
1 |
0 |
Obroty w lewo |
|
0 |
1 |
1 |
1 |
zwarcie |
|
1 |
0 |
0 |
0 |
Wolny bieg w prawo |
|
1 |
0 |
0 |
1 |
Obroty w prawo |
|
1 |
0 |
1 |
0 |
Zwarcie |
|
1 |
0 |
1 |
1 |
zwarcie |
|
1 |
1 |
0 |
0 |
Hamowanie obustronne |
|
1 |
1 |
0 |
1 |
zwarcie |
|
1 |
1 |
1 |
0 |
zwarcie |
|
1 |
1 |
1 |
1 |
zwarcie |
Jak widać w powyższej tabeli nie wszystkie stany są pożądane.
Błędne ustawienie tranzystorów prowadzi do ich nieodwracalnego zniszczenia poprzez spalenie. Sercem sterownika OSMC jest układ scalony HIP4081A który ułatwia sterowanie tranzystorami w mostku H. Może pracować przy zasilaniu
od 12 V do 80 V. Dzięki układowi HIP4081A tabela stanów redukuje się do znacznie krótszej i wygodniejszej postaci.
Tabela: Tabela stanów HIP4081A. 1 = 5V, 0 = 0V, X = nie istotne, PWM = Sygnał PWM
|
AHI |
BHI |
ALI |
BLI |
Disable |
Funkcja |
|
1 |
1 |
0 |
PWM |
0 |
Lewo |
|
1 |
1 |
PWM |
0 |
0 |
Prawo |
|
1 |
1 |
0 |
0 |
0 |
Hamowanie |
|
x |
x |
x |
x |
1 |
Disable |
Jak widać na schemacie HIP4081A ma 4 wejścia służące do sterowania wyjściami oraz dodatkowe wejście oznaczone disable, które nie jest zaznaczone na schemacie. Wszystkie linie wejściowe układu mogą przyjmować sygnały z zakresu od 3 do 12 V (zmodyfikowany TTL). Tak szeroki zakres przyjmowanych napięć czyni układ niezwykle uniwersalnym. Może zostać wysterowany zarówno przez układy pracujące przy napięciu 3.3V jak i 5V bez użycia dodatkowego konwertera napięć.
W projekcie w roli przełączników zastosowano bardzo mocne tranzystory MOSFET firmy International Ractifier, model IRF4905. Charakteryzują się niezwykle małą rezystancją, bardzo szybkim przełączaniem i dużym prądem. Jednak aby uzyskać zakładaną moc konieczne było wykorzystanie po czterech tranzystory na każdą z sekcji mostka H połączone w następujący sposób:
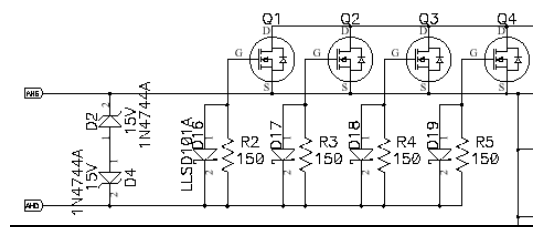
Rysunek: OSMC sterowanie bramkami
Bramki w tranzystorach MOSFET są bardzo wrażliwe na zbyt wysokie i zbyt niskie napięcie. Kilka volt różnicy może zniszczyć tranzystor. Aby chronić bramki tranzystora zastosowano diody Zenera.
Opisany sterownik silników OSMC spełnia wszystkie wymagania modelu wykonanego w ramach pracy dyplomowej jak również przyszłe związane z budową pełnowymiarowego pojazdu.
Poniżej przedstawiono najważniejsze dane techniczne sterownika:
Tabela: Parametry techniczne sterownika silników
|
Napięcie zasilania |
13 V – 50 V |
|
Maksymalne ciągłe obciążenie |
160 A |
|
Maksymalne chwilowe obciążenie |
~400 A |
|
Sygnały sterujące |
3 V – 12 V |
|
Częstotliwość PWM |
2 kHz, 4kHz, 16kHz, 32 kHz |
